
Accelerometer Physics: Choosing the right one // Technology
There are many accelerometer options for the Maker. Find out how to choose the right one for your project in Part 2 of the motion tracking series.
Last time we took a look at the basic physics of a MEMS. Let’s now take a look at how they are constructed.
Construction
There are three basic methods of constructing an accelerometer: 1. Piezo-Electric 2. Piezo-Resistive 3. Capacitive.
All of these methods still rely on the basic principle of detecting how a small mass moves and translating this to an electrical signal.
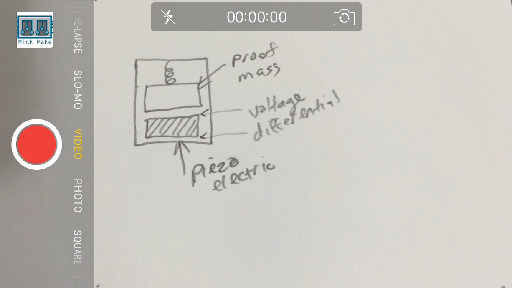
Piezo-Electric
A piezoelectric accelerometer is where the proof mass compresses a piezo crystal which generates an electrical impulse. You will find these mainly used for detecting shock and vibration.
These accelerometers are constructed with piezoceramic materials such as Lead Zirconate Titanate , (or PZT), or single crystals of Quartz or Tourmaline.


Pros/Cons:
- They have a low package weight.
- Can be used in applications with high temperature ranges.
- Are responsive to changes in acceleration.
- Are subject to high noise.
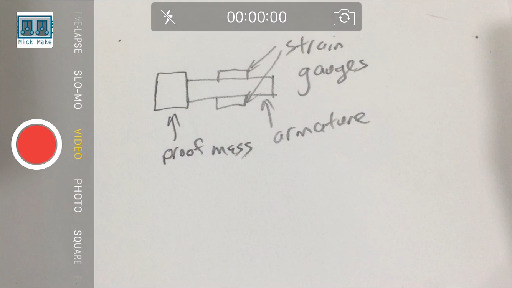
Piezo-Resistive
A piezoresistive accelerometer is constructed with a proof mass at the end of an armature and piezoresistors or “Strain Gauges” that measure the electrical resistance of the armature when it is under stress.
These accelerometers are constructed with the same materials as piezoelectric accelerometers.
Pros/Cons:
- These accelerometers require a complex fabrication process and are therefore expensive.
- However, they can measure higher G forces.
- But suffer from limited high frequency response.
- Like piezoelectric they are subject to high noise,
- and low accuracy.
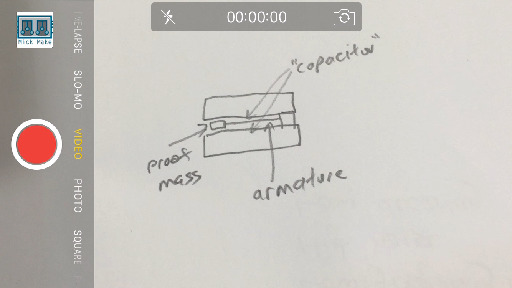
Capacitive
Capacitive accelerometers are created by suspending the proof mass and armature between two plates. This allows the capacitance to be measured between the armature and wall of the accelerometer. This is the most popular construction method.
These devices are made on silicon wafers, which is the cheapest and most reliable manufacturing process around.
Pros/Cons:
- This makes them very cheap to manufacture,
- because they are simple to make.
- They are influenced less by noise and temperature.
- Are reliable in operation.
- Have a higher accuracy than piezos.
- but suffer from low responsiveness,
- and can only measure low accelerations.
There are also some other methods that aren’t commonly used:
- Hall-effect
- Optical
- Thermal.
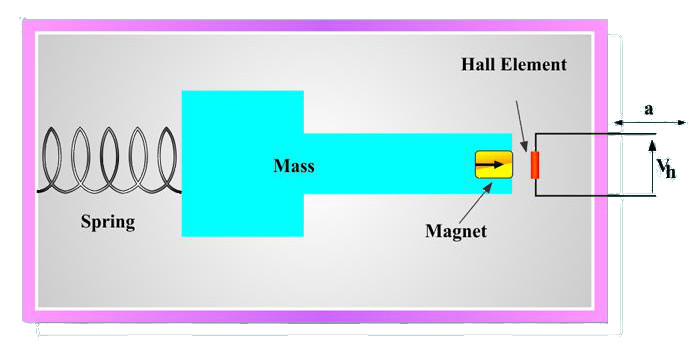
Hall-effect
Instead of a variable capacitor or resistor a hall-effect accelerometer measures the intensity of a magnet field.
Optical
Some Optical MEMS have been successfully tested in the lab some years back, but I haven’t seen any commercially available optical MEMS on the market. However this article seems promising.

Thermal
This is a small dome that heats up air and detects how that air moves. These are very expensive, and are usually out of the scope of the average Maker.
Common MEMS are usually designed to only measure in the one plane so they will contain three devices rolled into one providing the three axis, (X, Y and Z).

Connectivity
Depending on the type of accelerometer used will depend on how this information is presented to you. There are basically two ways:
Analog
Analog is the simplest way and provides analog voltage outputs indicating the acceleration component. Depending on your application you can use this analog signal straight, or more typically you would use an MCU with an onboard ADC to convert the voltage to digital. Some examples of MCUs with onboard ADCs are the ATmega32U4 series, of course the Raspberry Pi, and high end MCUs such as the NXP LPC series.
Digital
Digital accelerometers are by far the most common these days and provide acceleration data via a serial bus. You will find MEMS capable of connecting to the popular I2C and SPI busses.
Depending on your project needs you will have to be mindful of how you want to connect to your MEMS. Sometimes compromises have to be made for example; a more accurate MEMS might not have an I2C bus.
Selecting an accelerometer
In Part A of this series we saw a number of mechanical and electrical problems that will produce errors. MEMS manufacturers will make a trade off and make many devices with specifications meeting various application needs.
When selecting a MEMS there are several key parameters that you have to be mindful of:
- Range.
- Sensitivity / Resolution.
- Zero G offset.
- Noise and drift.
- Temperature range.
- Sampling rate.
If you go to the manufacturer’s website you can download the datasheet.
For example if you download the datasheet for the MPU9150: you will find the relevant section on page 12.
Range
Taking a look at the “Full-Scale Range” section you will notice that this MEMS has a number of programatically selectable ranges from +/- 2G up to +/- 16G.

Sensitivity / Resolution
Moving down to sensitivity; since this device has digital outputs, the resolution units are LSB/G.

To determine the actual resolution requires some calculation. If the lowest range is selected, 2G - then we have 4G worth of values that need to be expressed in the 16 bit word size. This means that a one bit resolution would be 61mG.

Temperature range
Moving to temperature: This device has a drift in resolution of +/- 0.02% per degree change.

To find out the baseline temperature of the device look at the top of the page. You’ll find most devices have this set to 25C or “room temperature”.

Zero G offset
The Zero G or offset bias is important for calibration. If you buy one of these; then it will have a Zero G output somewhere between +/- 80 mG for the X/Y axis, and +/- 150 mG for Z axis.

The IMU5000 in my earlier video clearly had a very large offset bias.
Bias drift with temperature
The next section on the datasheet shows you the potential change in bias over a given temperature range. This is important to know if your project will be getting close to any of the temperature range extremes.

Noise
Noise performance tells you how the device is affected by noise when fetching data at a particular rate. This isn’t so critical, but can be an influence when fetching data at high rates. This device introduces errors at 400 uG / Hz.

Sampling rate
The sampling rate shows you how fast you can actually poll, or fetch data from your device.

Real World Example
To get an idea of just how this device will respond in a real world scenario it’s important to take into account all these factors.
For example: If you’ve selected the lowest scale, (2G), and the temperature is 25C.
The zero G output will oscillate between +/- 150mG on the X/Y axis and 300mG on the Z axis, but there’s also a +/- 3% initial tolerance, which means worst case you will have an error of +/- 154.5mG, (or 309mG variance).
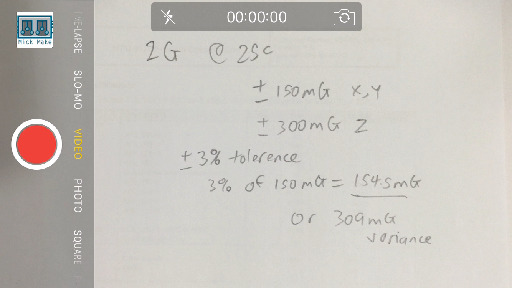
Taking into account that the 1 bit resolution is 61mG the data output will potentially oscillate between 5 to 6 digital values.

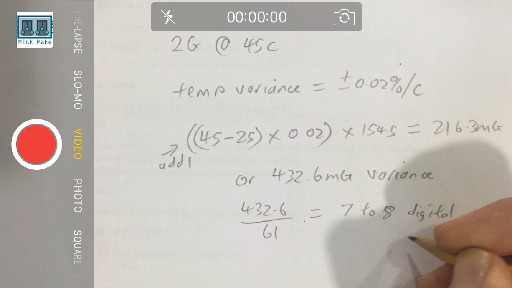
This is at room temperature. Now let’s look at an extreme. Say a typical Australian summer max of 45C:
Now we introduce the temperature variance of +/- 0.02 % / C change.
So, now we have a +/- 216.3mG error or a 432.6mG variance. This means you will see the output fluctuate randomly between 7 to 8 digital values.
Thanks for reading Part 2 of this in-depth look at motion tracking devices. In Part 3 of this series of motion tracking devices we’ll be looking at gyroscopes which allow you to determine the rotation of a device.
