Accelerometer Physics: How does it work? // Technology
Accelerometers are used everywhere, but how do they work? Find out in the first part of a series taking a look at the physics of motion tracking devices.

Gravity:
Before we delve into accelerometer construction let’s go back to some basic physics.
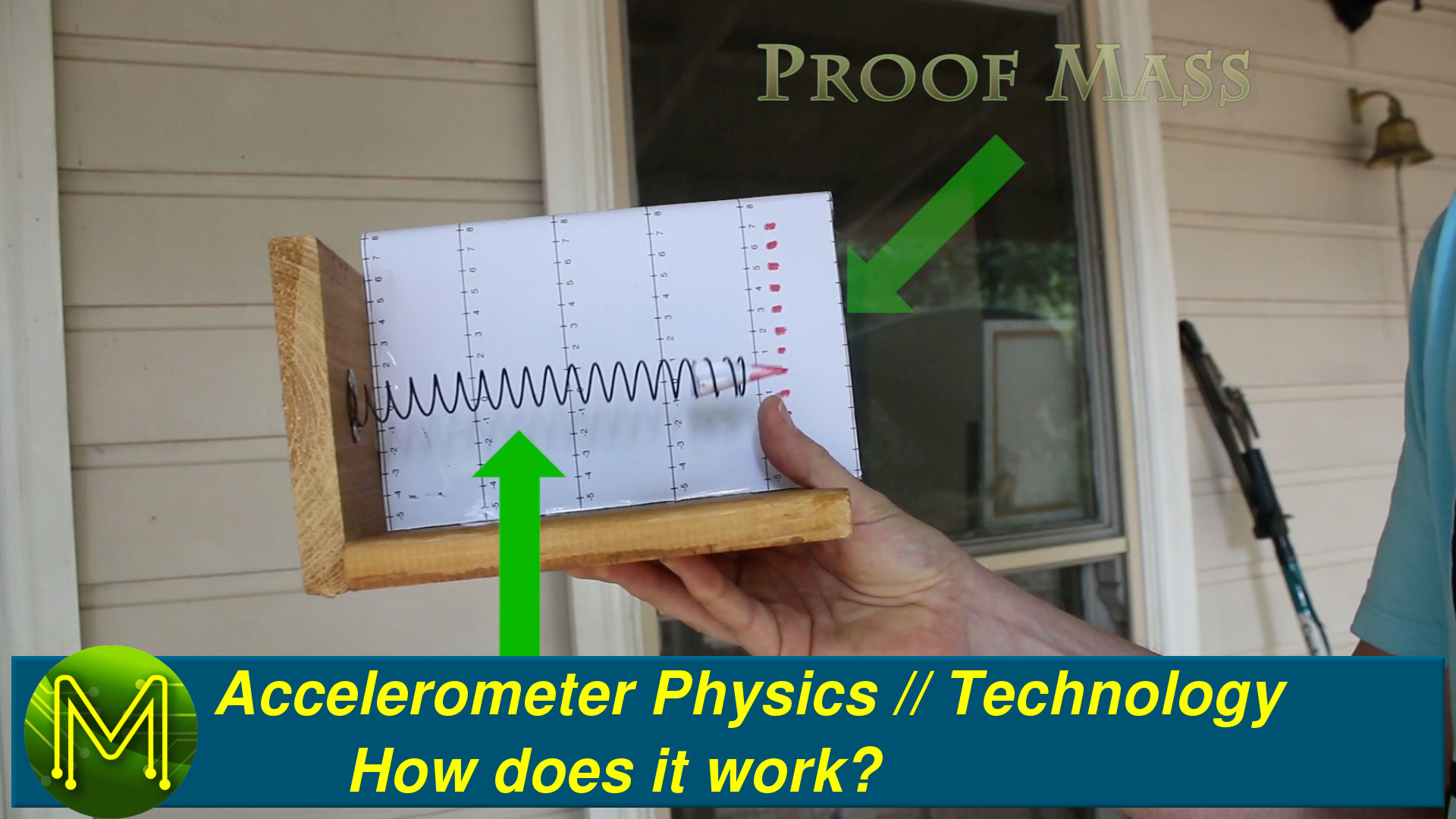
Speed or velocity is comprised of two elements. If a certain object travels a known distance in a known amount time. Then this is known as velocity.Acceleration is how much that something increases it’s velocity over time. A body travelling at the same velocity over a given time frame has at the basic level a zero acceleration. When you make this body go faster, then acceleration will increase for the duration you are making it go faster.Gravity is all about acceleration. The earth is exerting a force on everything pulling everything in. Gravity can be expressed as a constant, which is around 9.8 m per second per second.From the perspective of an accelerometer the device will experience an acceleration of around 9.8 m/s2. This also means that if the accelerometer is falling from the sky it will show zero acceleration. This all seems counterintuitive, but bear in mind that the accelerometer is measuring acceleration relative to it’s own frame of reference.From a Maker’s point of view we just need to keep several facts in mind: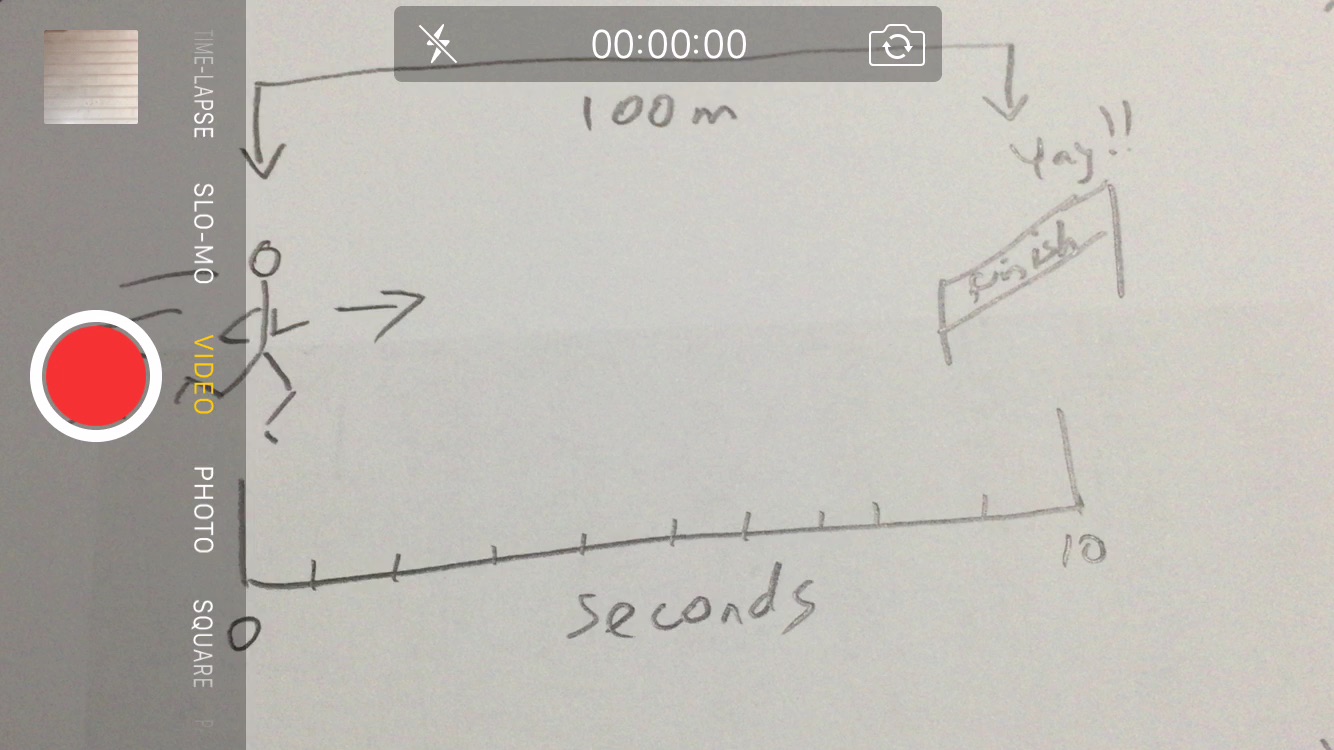
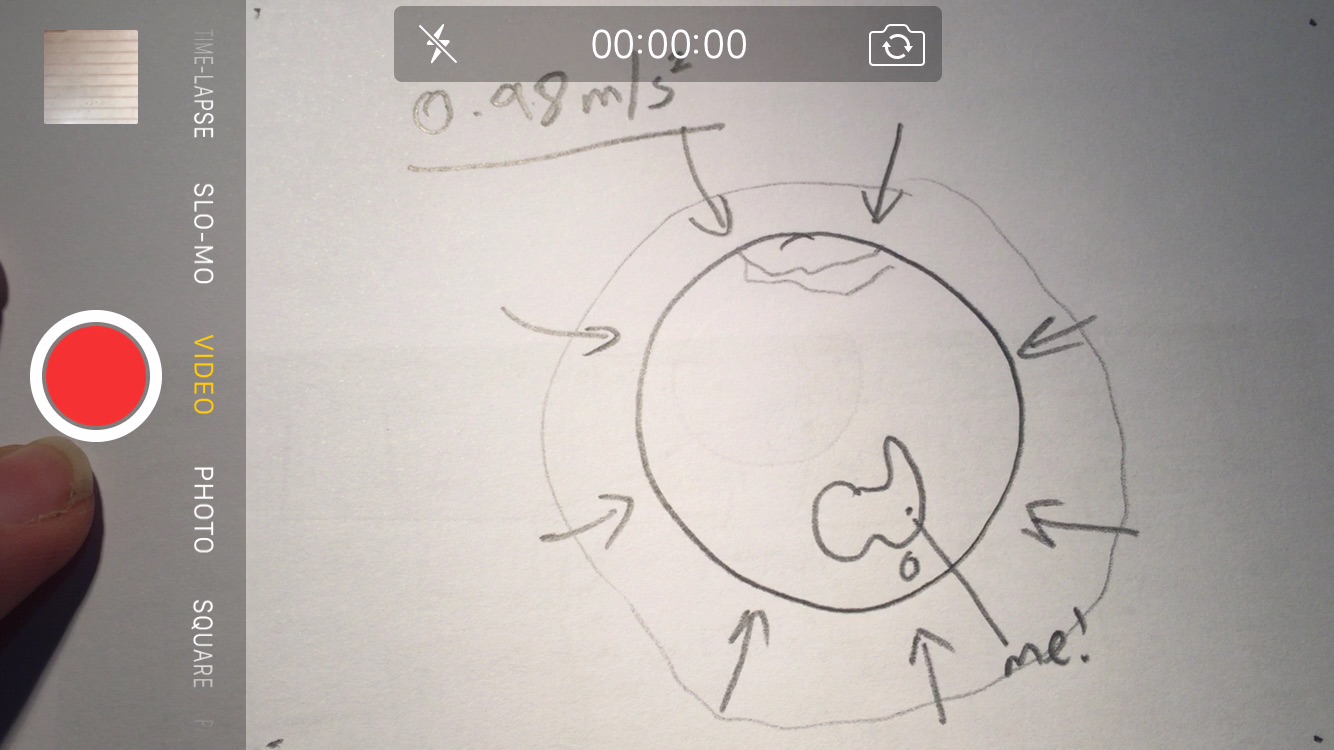
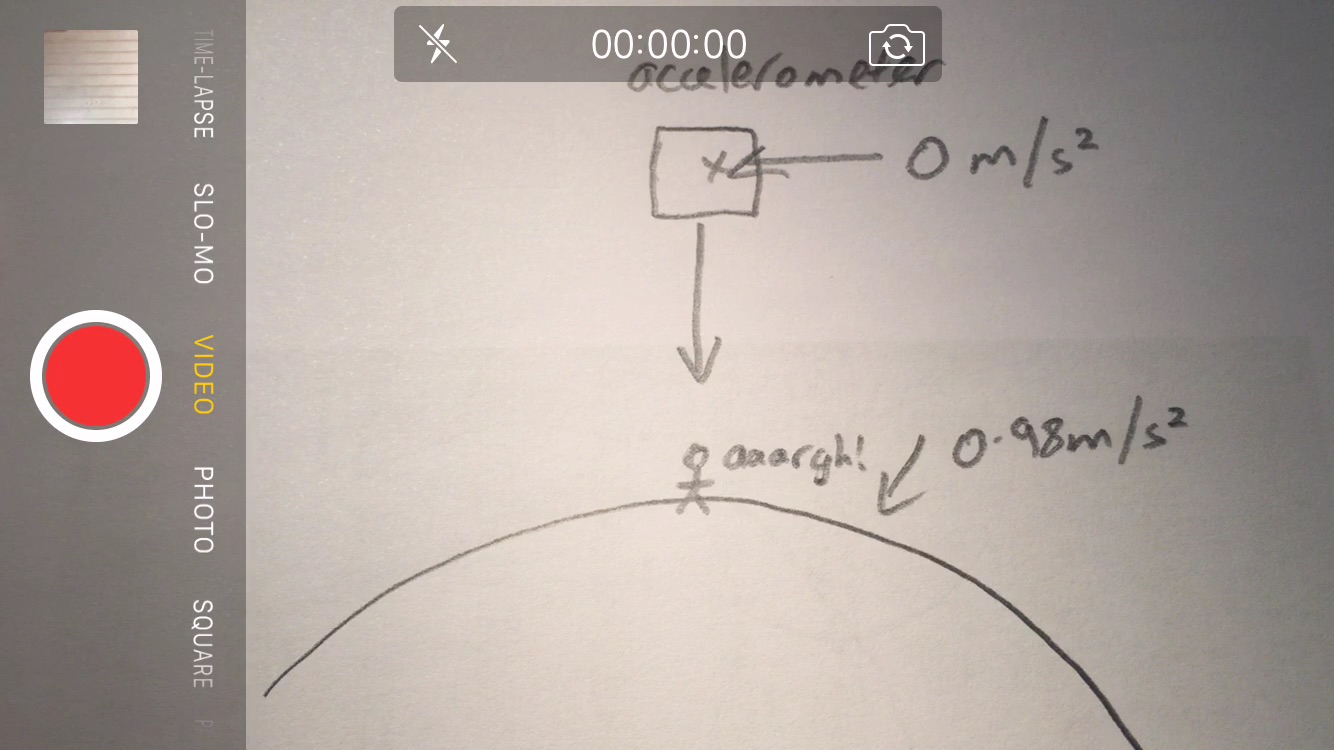
- The accelerometer measures acceleration.
- Since gravity is an acceleration, then usually you will want to remove this component depending on your application.
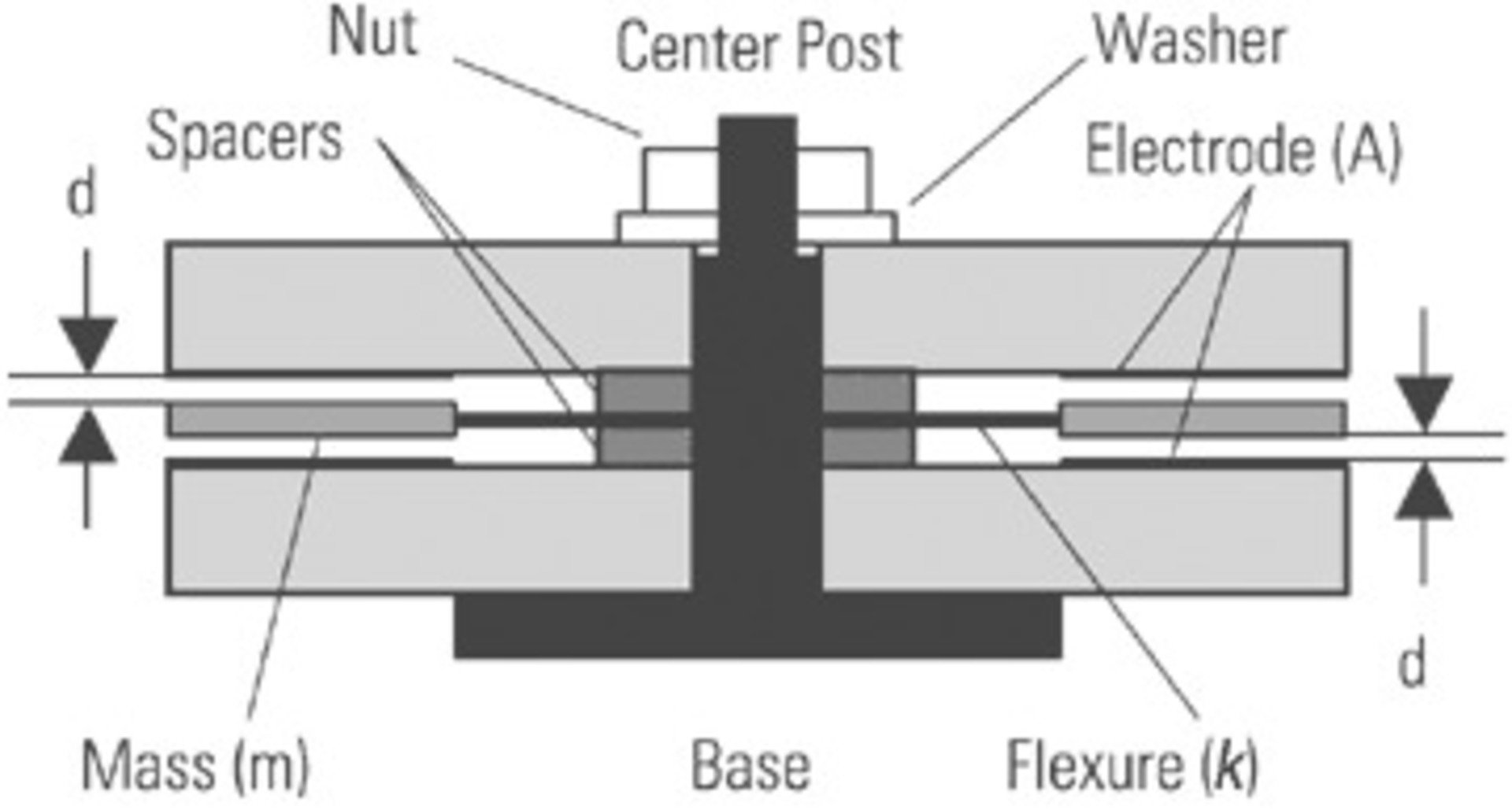
Mechanics:
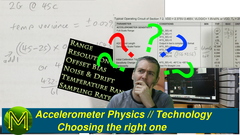
Modern accelerometers are referred to as MEMS, which means Micro Electro-Mechanical System and this is for good reason, as they contain both an electrical and mechanical component. The basic concept of an accelerometer is a small mass, or “proof mass”, or “seismic mass” with a way of measuring how that mass moves.
To make it easier to understand, I made a model showing this.
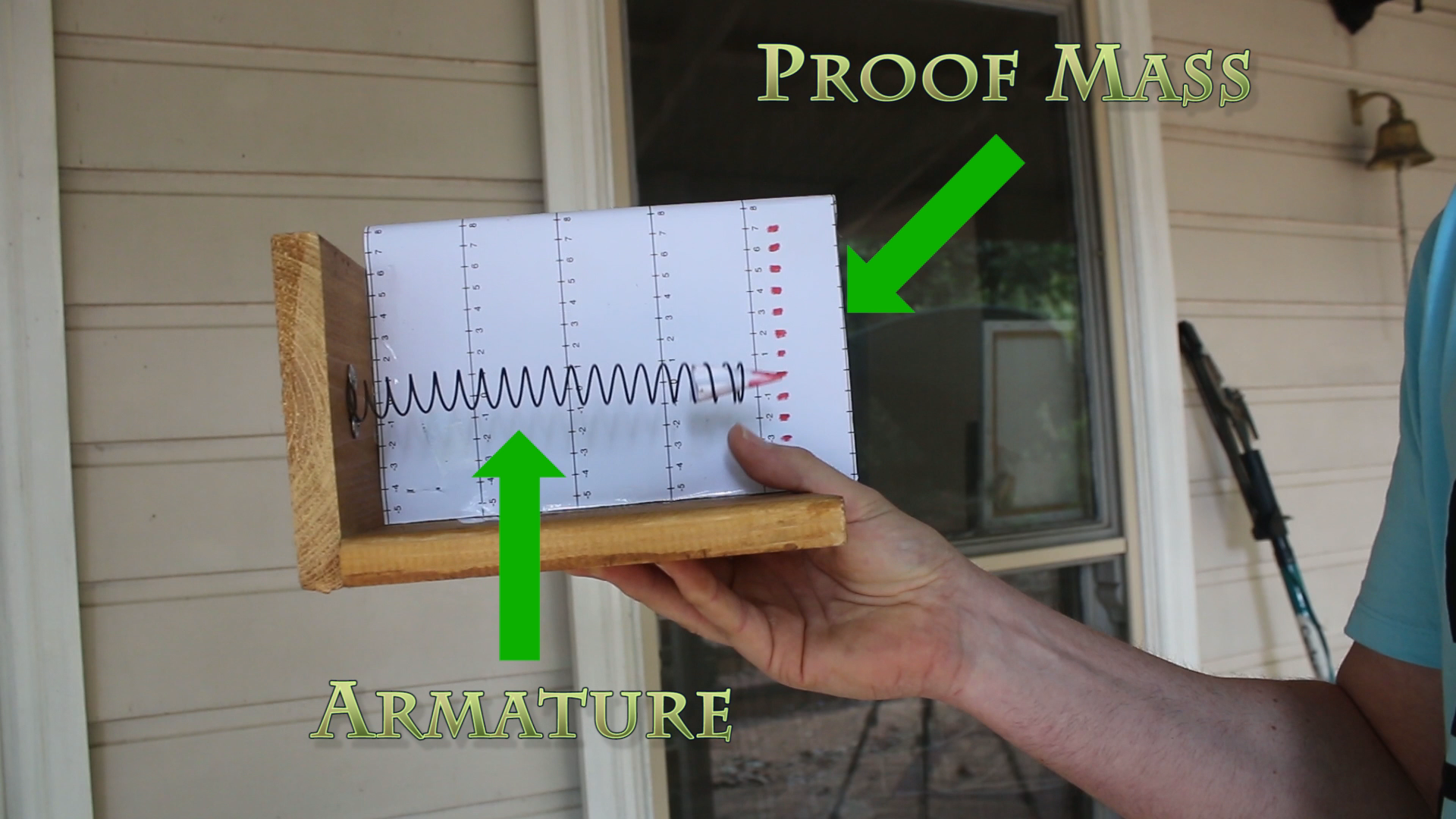

Watch the YouTube video of the IMU5000 in slow motion action.
There are several basic aspects to note in this slow mo video.
You can observe that when I’m holding the IMU 5000 at the top just before releasing there’s virtually no movement of the “proof mass”, apart from an oscillating wobble, and the spring is bent slightly indicating gravity’s influence on the “proof mass”.
As I release it you will see that the proof mass moves up indicating a change in acceleration. Since this is a free-fall then it would be indicating zero G, and would be the calibrated zero point for my IMU 5000. Ignoring all the other complex forces at play here.
Lastly, as the IMU 5000 hits the floor the “proof mass” swings down indicating a very large deceleration component.
This is the basic principle of a MEMS accelerometer. However, these devices are very sensitive and designers need to resolve many issues.
1. Let’s take another quick side-step into physics again… Any mass has momentum. Momentum is basically the inability of an object to slow down when an apposing force is applied. Momentum is expressed as mass * velocity. The larger the mass, like a truck, then the longer that mass will take to slow down. Increase the opposing force and it takes a shorter time.

MEMS devices aren’t immune to momentum even though their mass is measured from nanograms to micrograms. This means that the greater the “proof mass” the lower the responsiveness to changes in acceleration. So you want the mass to be as small as possible. However, if you make it too small then the device’s ability to measure high forces is reduced and will be more susceptible to vibration noise.
2. Going back to the video. You’ll notice that the spring was wobbling when I was holding it still at the top. This is caused by micro vibrations, (and also the pendulum effect), travelling along the armature. If the armature is too long then it becomes less responsive to changes in acceleration and can also start to oscillate more. Additionally, every object has a resonance frequency, more so for long objects. Micro-vibrations can cause resonance in the armature which introduces errors. One way of combating this is to dampen the armature; you can use liquids, gasses, magnets, mechanical isolation, or even complex algorithms, but essentially they all attempt to reduce the noise caused by the swing of the armature. Consequently, dampening the armature too much and the responsiveness is reduced. So, MEMS designers have a trade off between responsiveness of the MEMS vs noise immunity. They will usually target MEMS for different applications to ensure noise is kept to a minimum.
In Part B we will be looking at how accelerometers are constructed, how you can read data from an accelerometer, and different ways in dealing with errors in data.